检测需求:如图检测两个高度信息
精度要求:0.02
相机选型:单台SR6030线激光3D相机
成像方式:相机固定,零件运动
速度要求:每3秒检测一个
测量方法:在测量点和基准点各选1点,测量两点高度差;共两组
检测需求:如图检测两个高度信息
精度要求:0.02
相机选型:单台SR6030线激光3D相机
成像方式:相机固定,零件运动
速度要求:每3秒检测一个
测量方法:在测量点和基准点各选1点,测量两点高度差;共两组
土压平衡盾构机属封闭式盾构,以刀盘开挖进入土仓的渣土为主要介质来平衡开挖面水土压力,以达到稳定开挖面的效果。适用于国内大多数城市地铁隧道、管廊隧道施工项目。
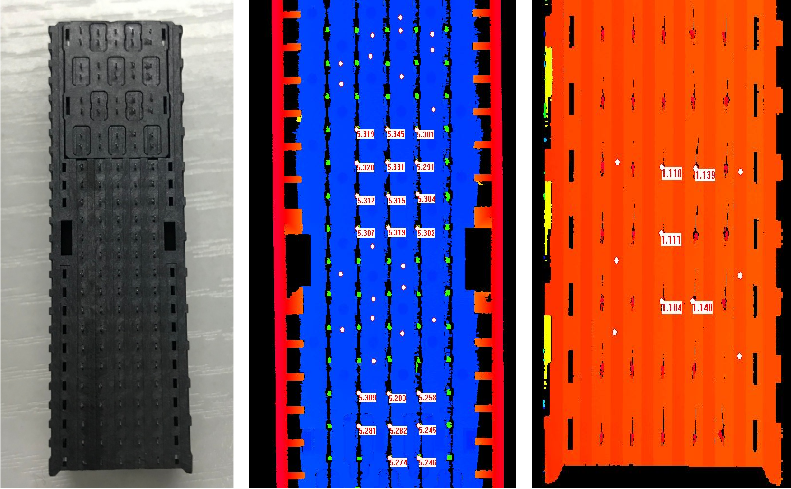
项目检测对象为某公司五金小件,检测需求为检测两点高度差,如下图所示。

采用用SR6030线激光相机扫描被测零件。SR6030的相机参数如下表所示。
|
参数 |
数值 |
|
X轴宽度 |
16mm |
|
光源波长 |
405nm |
|
Z轴重复精度 |
0.5um |
|
X轴重复精度 |
2.5um |
|
X轴数据间隔 |
10um |
|
X轴轮廓点数 |
1600 |
|
扫描速度(Hz) |
460~2500 |
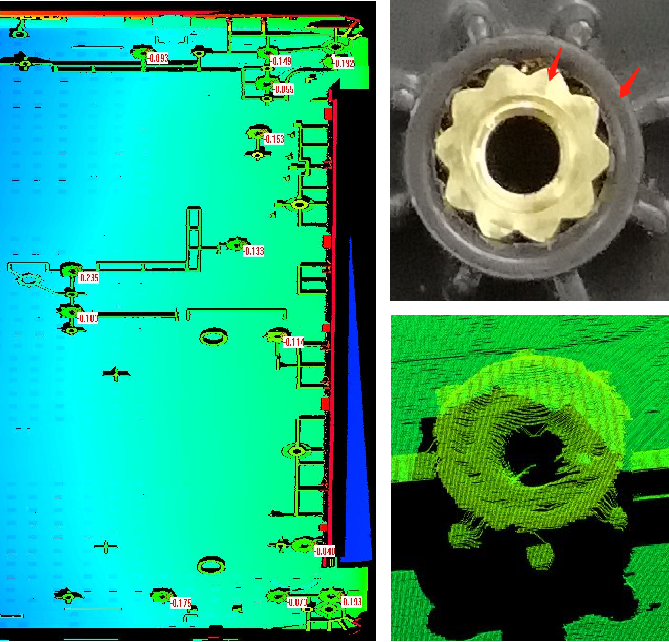
对产品进行3D成像,获得点云,并在KZVision视觉处理软件中对点云数据进行处理,在测量点和基准点各选1点,测量两点高度差,共两组,如下图所示:
多次对样品进行检测,检测结果如下表所示。
|
|
e尺寸 |
d尺寸 |
|
1 |
3.8178 |
0.5139 |
|
2 |
3.8182 |
0.5155 |
|
3 |
3.818 |
0.5128 |
|
4 |
3.8183 |
0.5141 |
|
5 |
3.8045 |
0.5233 |
|
6 |
3.8124 |
0.5177 |
|
7 |
3.8087 |
0.5198 |
|
8 |
3.8107 |
0.5167 |
|
9 |
3.8136 |
0.515 |
|
10 |
3.8155 |
0.5133 |
|
11 |
3.8124 |
0.5145 |
|
12 |
3.8135 |
0.5157 |
|
MAX |
3.8183 |
0.5233 |
|
MIN |
3.8045 |
0.5128 |
|
MAX-MIN |
0.0138 |
0.0105 |
12次检测结果显示,高度差动态重复性为0.015mm以内。
常见问题
相关产品
友情链接:
电话:18670379151/13873107486
地址:长沙市岳麓区银盆南路357号威盛大厦B栋7楼